Глава III
АППАРАТУРА ДЛЯ ТЕРМОМЕХАНИЧЕСКОГО АНАЛИЗА
Принципы устройства приборов для ТМА и их элементы
Назначением аппаратуры для ТМА является осуществление и измерение деформации полимеров в ходе изменения их температуры. При всем многообразии приборов, разработанных для этой цели, все они содержат определенные функциональные элементы, соответствующие основным принципам методики. Эти элементы и их взаимные связи представлены на следующей блок-схеме:
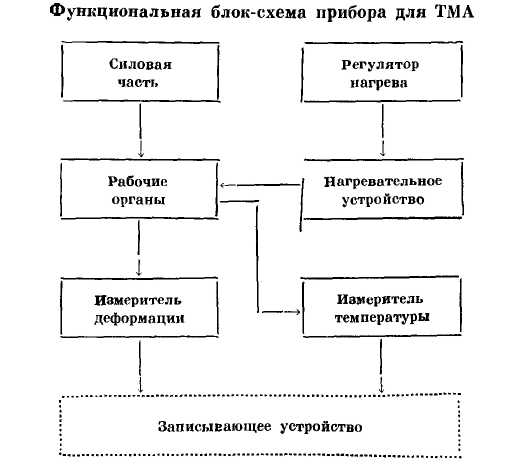
Элементы, составляющие левую часть схемы, связаны с механическим воздействием на полимер и измерением деформации *; в правой части — элементы, обеспечивающие тепловое воздействие и измерение температуры. В автоматические установки входит оран регистрации величин деформации и температуры — самописец. Некоторые приборы имеют устройства (не показаны на схеме) для создания контролируемой газовой среды, позволяющие, в частности, проводить эксперимент в инертной атмосфере либов вакууме. Рассмотрим роль и принципы действия каждого из элементов прибора, при этом удобнее несколько отклониться от порядка, в каком они помещены на схеме.
* В варианте методики для регистрации ДИН вместо измерителя деформации используется измеритель силы.
Рабочие органы прибора представляют собой совокупность деталей, находящихся в непосредственном контакте с исследуемым образцом и осуществляющих его деформацию. Конструкция их различна в зависимости от рода деформации. Так, при исследовании одноосного сжатия рабочие органы просто должны иметь параллельные плоские поверхности, тогда как для исследования растяжения они оснащаются специальными зажимами или иными устройствами для закрепления образца. В случае пенетрации рабочими органами являются пуансон и чашечка, заполненная образцом.
Силовая часть служит источником усилия, вызывающего деформацию полимера. В простейшем случае это груз, накладываемый или подвешиваемый таким образом, что вызывает взаимное сближение или отдаление рабочих органов прибора. Источником силового воздействия может быть также поддерживаемое постоянным усилие гидравлического пресса или откалиброванная пружина. С помощью пружины либо рессоры с эксцентриком можно, в частности, проводить нагружение по синусоидальному закону.
При использовании пружин в качестве источника постоянного нагружения следует иметь в виду изменение их усилия в ходе деформации (поскольку сжатая пружина при этом несколь ко разжимается, а растянутая — сокращается). Это обусловлено тем, что, как правило, суммарная длина образца и пружины задается постоянной. Чтобы изменение усилия было небольшим, лучше работать с пружинами относительно большой длины и при небольших деформациях.
Описаны установки, работающие в режиме постоянного нагружения, в которых длина пружины и соответственно ее усилие поддерживаются неизменными путем регулирования суммарной длины образца и пружины. Это достигается при помощи автоматической следящей системы с использованием датчика, располагаемого между пружиной и образцом. При появлении малейших отклонений от установленной длины пружины включается сервомотор, немного растягивающий (либо сжимающий) систему пружина—образец до восстановления исходного значения длины пружины [98].
Чаще всего в ТМА используют силу тяжести, подбирая гирю, способную создать в образце механическое напряжение необходимой величины. Обычно при этом остается без внимания тот факт, что по мере деформирования и изменения сечения образца величина напряжения изменяется. Однако в отдельных случаях принимаются меры для поддержания постоянства этой величины. Из числа приспособлений, предназначенных для этой цели, укажем на простейшее (рис. III.1).
Груз действует на образец посредством своеобразного рычага, соотношение плеч которого изменяется по мере растяжения образца. Это достигается с помощью специального кулачка (фигурного диска). Часть его — круг, другая же часть имеет сложный профиль. С образующей поверхностью круговой части связан трос, соединенный с рабочим органом прибора, тогда как с поверхности, имеющей сложный профиль, спускается трос, несущий груз. Соотношение плеч образованного таким способом рычага равно отношению радиуса окружности r к проекции R радиус-вектора А фигурной части на горизонтальную ось. Если исходное значение этой проекции равно R0, то по мере удлинения образца оно должно уменьшаться.
Профиль фигурного диска задается соотношением
R = Rо/(1 + ),
где — относительное удлинение образца. Одним и тем же диском можно пользоваться (независимо от удельной нагрузки) при условии, что образцы всегда имеют одинаковую исходную длину. Для передачи усилия от силовой части прибора к рабочему органу применяются рычаги, штоки, тяги и прочие детали механизмов, действующие таким образом, что силой трения можно пре небречь. Собственный их вес либо пренебрежимо мал, либо учитывается при расчете действующего усилия, либо, наконец, компенсируется с помощью противовеса, поплавка или возвратной пружины (рис. III.2).
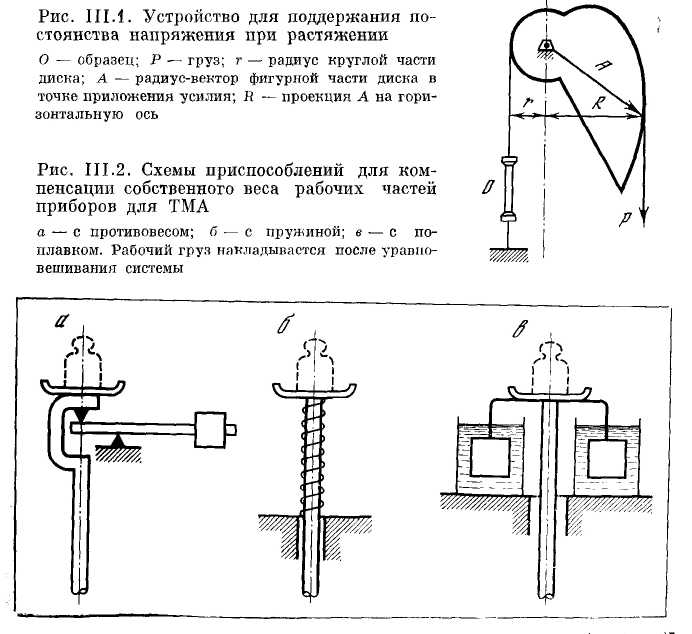

В случае поплавка надо позаботиться, чтобы выталкивающее усилие не изменялось в ходе деформации. Поэтому поплавок при любом положении рабочих органов должен быть погружен в жидкую среду полностью. Что касается использования возвратной пружины, то здесь остаются в силе замечания, сделанные только что относительно пружины как источника силового воздействия.
С использованием уравновешивающих устройств можно переходить от одного вида деформации (сжатие) к другому (растяжение). Так, если противовесом служит груз меньший, чем необходимо для равновесия, образец будет испытывать усилие сжатия (положительное), если же в качестве противовеса взять груз больше равновесного, можно сообщить образцу растягивающее (отрицательное) усилие. Однако, как правило, приборы конструируются в расчете на один определенный тип деформации — растяжение или сжатие (пенетрация).
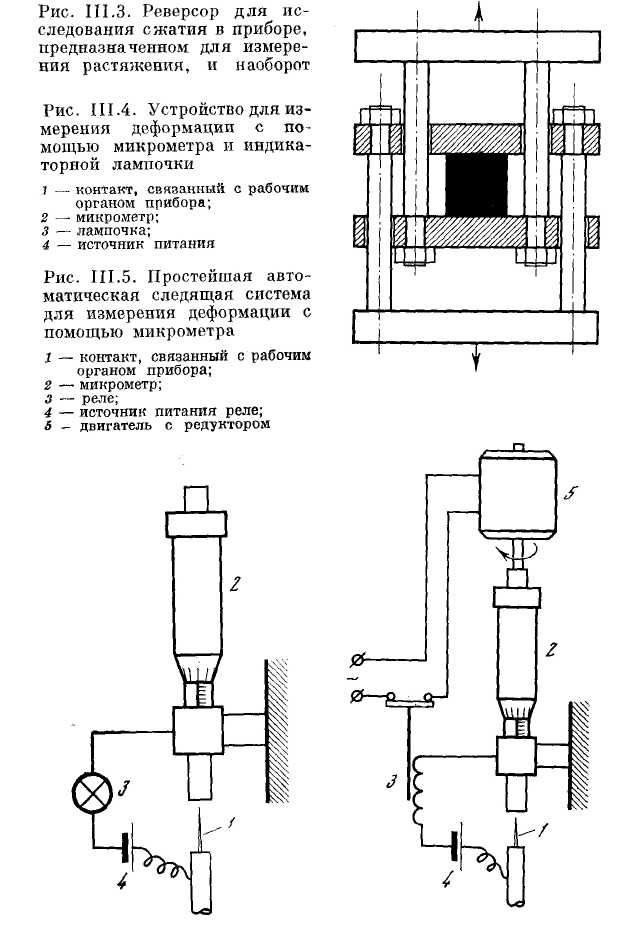
Тем не менее устройства, рассчитанные на исследования методом растяжения, могут быть приспособлены также для работы в режиме сжатия либо пенетрации, и наоборот. Для этой цели служат специальные приспособления (реверсоры), представляющие собой две жесткие рамки, вставленные друг в друга наподобие звеньев цепи, так, что при раздвижении их наружных краев внутренние края сближаются, и наоборот (рис. III.3).
В опытах с постоянным нагружением приложенное усилие действует в течение всего эксперимента, в опытах с переменным нагружением усилие прикладывается по определенной программе. В простейшем случае груз вручную накладывают на некоторое время и затем снимают; при изменившихся температурах операцию многократно повторяют. В некоторых автоматических приборах имеются специальные нагружательные механизмы, приводимые в действие от таймерного устройства — задатчика периодического нагружения с набором дискретных программ. В любом случае груз должен накладываться достаточно плавно, чтобы не возникало заметных динамических перегрузок.
Измерение деформации сводится к определению величины линейных перемещений рабочего органа прибора или связанного с ним указателя, что осуществляется визуально, либо с помощью регистрирующих приборов (посредством тех или иных видов преобразователей) .
Визуальные отсчеты проводят относительно неподвижной шкалы: непосредственно, исключая по возможности параллакс, или же с использованием нониуса, микрометра, визирных устройств, отсчетного микроскопа либо катетометра. При использовании винтового микрометра нередко применяют специальное приспособление, позволяющее более точно делать отсчет (рис. III.4). В момент прикосновения микрометра к пуансону или к связанному с ним контакту замыкается электрическая цепь и зажигается индикаторная лампочка. Нетрудно видеть, что на основе подобного приспособления может действовать и автоматическое следящее устройство (рис. III.5). Последнее должно содержать вспомогательный электродвигатель, вращающий винт микрометра и включенный таким образом, что он останавливается при достижении электрического контакта. Для этого вместо лампочки в схему вводится ролик *. Индикаторная и автоматическая следящие системы могут быть и бесконтактными, с применением дифференциально-трансформаторных или емкостных (конденсаторных) датчиков. Соответствующие схемы будут рассмотрены ниже.
* В случае знакопеременных деформаций используется более сложная схема (см., например, [99]).
Для увеличения масштаба измеряемое поступательное движение нередко преобразуют во вращательное таким образом, что оно вызывает поворот легкого зеркальца. Направляя на зеркало через узкую щель луч света от неподвижного источника, наблюдают смещение отражения вдоль закрепленной шкалы. Следует заметить, что при больших смещениях могут сказаться ошибки, связанные с непропорциональностью отклонения «зайчика» по линейной шкале углу поворота зеркальца.
Другой способ преобразования линейного перемещения пуансона во вращательное движение реализуется с помощью кремальерного устройства в специальных стрелочных микрометрах (индикаторах), представляющих собой прецизионный мерительный инструмент. При использовании стрелочного микрометра для измерения деформации следует иметь в виду, что в его механизме действует возвратная пружина. Усилие этой пружины является дополнительным (вообще говоря — переменным) слагаемым к величине нагрузки, действующей на образец, и его следует учитывать, особенно при малых нагрузках. Ясно, что невозможно осуществлять измерения при мерительном усилии, меньшем, чем сила пружины, и это несколько ограничивает использование индикаторов в , и в особенности для дилатометрических измерений.
Дополнительных усилий требуют также некоторые преобразователи механического перемещения в электрические величины (рис. III.6). Таковы, и частности, тензодатчики, применение которых предусматривает изгиб пружинящей пластины при перемещении рабочих частей прибора. Тензометрический датчик — это резистор из тонкой проволоки, многократно изогнутой в виде плоского зигзага; сопротивление его изменяется при деформации пластины, к которой он приклеен. Включенный в мост Уитстона в паре с подобным резистором, не испытывающим механического воздействия, он позволяет определять величину деформации.
Из числа электрических преобразователей, кроме тензодатчиков, применяются также реостатные, емкостные и индукционные датчики [100]. Все они должны иметь линейные характеристики, в противном случае приходится корректировать показания с помощью градуировочных графиков, а непосредственная запись ТМА-кривой с соблюдением масштаба по оси деформаций делается невозможной.
Реостатные датчики представляют собой переменный резистор (потенциометр или реохорд), подвижный контакт которого тем или иным образом связан с рабочими частями прибора. Регистрация показаний такого датчика осуществляется с помощью моста сопротивлений или потенциометра. Небольшим усилием трения контакта можно пренебречь при достаточно больших нагрузках, но при нагрузках малых этот фактор может внести значительные искажения: нарушается плавность перемещения рабочих частей, на записываемом графике возникают ступеньки.
Емкостные и индукционные преобразователи являются бесконтактными. В емкостных преобразователях при перемещении рабочих органов изменяется расстояние между обкладками конденсатора (либо их действующая поверхность) и соответственно емкость, в индукционных — вдвигается в катушку ферромагнитный сердечник, в результате чего изменяется индуктивность. В этих датчиках, работающих па переменном токе, в ряде случаев выгоднее иметь дело с частотами, более высокими, нежели сетевая (50 гц); для этого используются «звуковые» генераторы.
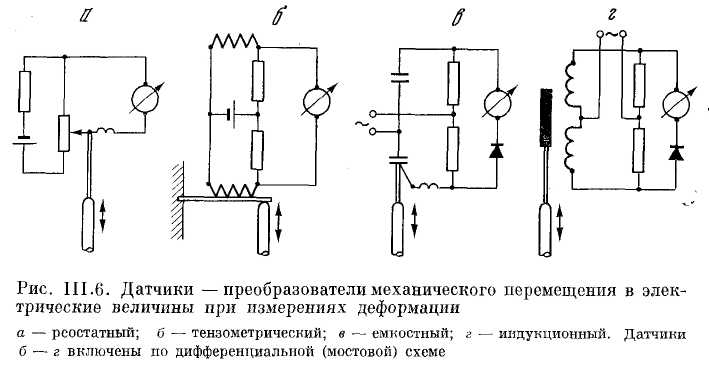
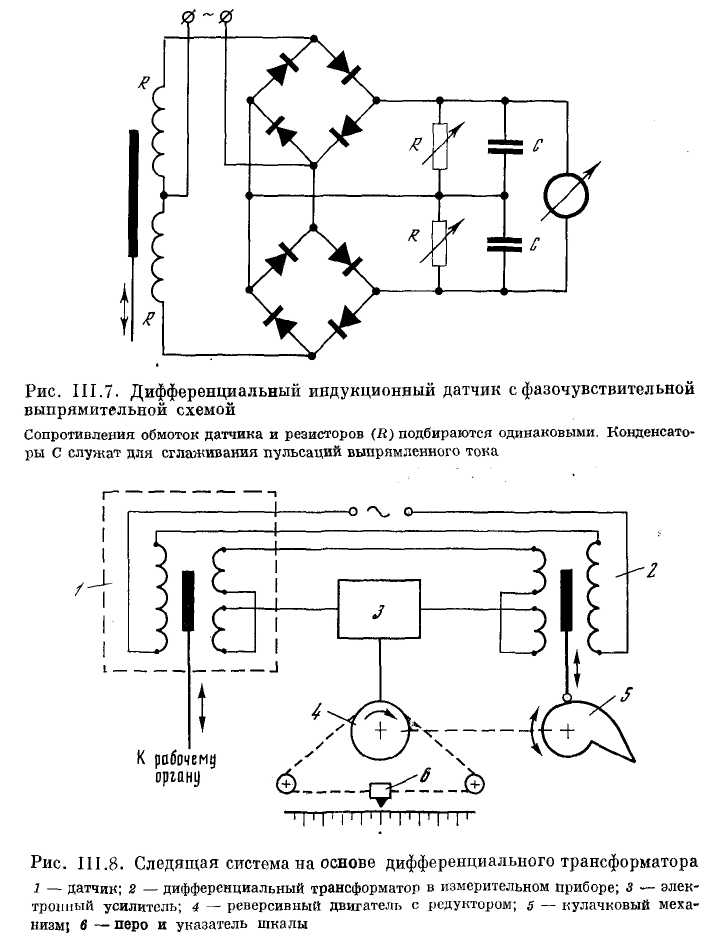
В качестве выпрямительного элемента вводится, как это показано на рис. III.6, в, г, диод или же обычный мостик из четырех таких диодов [101]. Применение дифференциальных (компенсационных) схем включения преобразователей позволяет приблизить их характеристику к линейной. Использование совместно с индукционным датчиком типа дифференциального трансформатора специальной фазочувствительной схемы выпрямления дает возможность сделать рабочую область симметричной по отношению к точке компенсации [102] (рис. III.7).
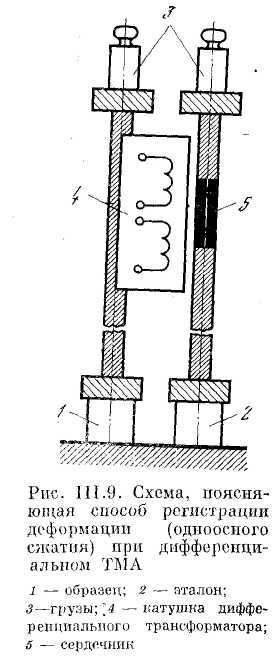
В ряде случаев предпочтительны следящие системы, датчиком и основой исполнительного механизма которых являются дифференциальные трансформаторы (рис. III.8). При отклонении сердечника от положения компенсации исполнительный механизм движет сердечник в аналогичной системе самописца, перемещая одновременно перо по бумаге. Преимуществами такой системы измерений являются линейность характеристики и невосприимчивость к колебаниям питающего напряжения; она может быть реализована с помощью приборов типа ДС-1 или КСД-2.
Применяются также следящие системы на основе дифференциального трансформатора, не требующие такого же трансформатора в исполнительном устройстве. При возникновении разбаланса в датчике исполнительный механизм восстанавливает равновесие в нем. Здесь возможны два варианта. В одном из них с помощью винтового, кулачкового или иного механизма смещается в нужном направлении катушка датчика так, что она постоянно следует за своим сердечником [103]. Это смещение может быть измерено и зарегистрировано. Измеренная величина в зависимости от расположения датчика может характеризовать изменение длины образца (деформацию) либо длины пружины (степень сжатия). Иначе говоря, прибор может действовать и как деформометр, и как динамометр.
В другом варианте действия, в результате которого сердечник поддерживается в нейтральном положении, автоматически с помощью того же исполнительного механизма выполняются внешними устройствами. Например, регулированием натяжения пружины изменяется усилие, действующее на образец. Этот вариант применяется не для регистрации деформации, а для автоматического поддержания постоянства усилия или постоянства длины образца.
Другим способом, близким к только что рассмотренному, является использование сельсинной схемы. Последняя представляет собой систему из двух специальных двигателей (сельсинов), один из которых связан с рабочим органом, а другой приводит в движение перо пишущего устройства.
В следящем устройстве могут быть использованы и другие подходящие преобразователи перемещений в электрические величины [100]. Описаны, в частности, следящие системы на основе емкостных преобразователей [104].
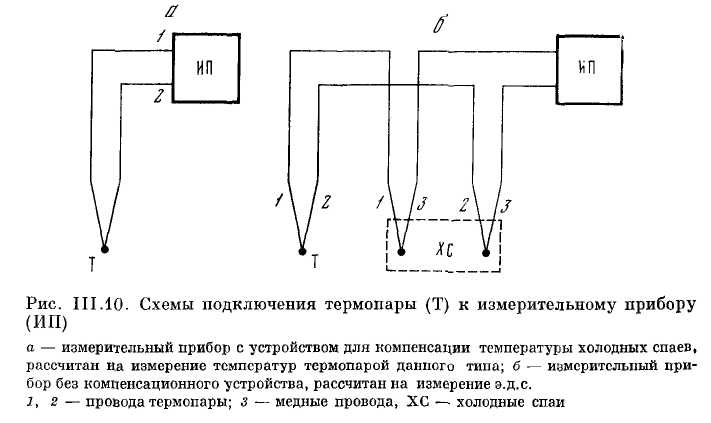
При проведении дифференциального ТМА с двумя образцами — исследуемым и эталонным — отсчитывается непосредственно разность деформаций. Этого можно достичь, если шкалу, по которой ведется отсчет, сделать подвижной, соединив с рабочим органом, осуществляющим деформацию одного из образцов. Тогда указатель, связанный с рабочим органом, деформирующим второй образец, отметит по шкале разностную величину. Тот же принцип применяется и при использовании дифференциального трансформатора: деформация одного из образцов вызывает перемещение катушки трансформатора, а другого — движение сердечника относительно этой катушки (рис. III.9). Нетрудно себе представить, как можно реализовать рассматриваемый принцип и в случае емкостных датчиков.
Существенным моментом является не только точность отсчета, но и быстрота снятия показаний при визуальных определениях и быстродействие механизмов при автоматической регистрации, особенно для случаев кратковременного нагружения. Применяя системы с микрометрическим винтом, можно хорошо следить за процессами медленной деформации, при быстром же нарастании деформации, например сразу же после приложения груза, неизбежно отставание [105]. Современные самописцы, время пробегавсей шкалы которых составляет секунды, достаточно хорошо успевают за ходом деформации в любом из применяемых в ТМА режимов деформирования (кроме высокочастотных).
В заключение следует заметить, что возможности современной аппаратуры в отношении чувствительности измерений линейных величин практически беспредельны. Однако в аппаратуре для ТМА полимеров часто приходится ограничиваться умеренной чувствительностью, чтобы иметь возможность записать полностьюТМА-кривую, охватывающую наряду со стеклообразным также высокоэластическое и значительную область вязкотекучего состояний. При этом не выявляются упругие деформации и тепловое расширение полимеров.
Измерение температуры обычно не составляет проблемы. В простейшем случае при визуальных отсчетах применялись обыкновенные термометры или термопары с милливольтметром, отградуированным в градусах температурной шкалы. Для автоматической регистрации температур используют термопары, термометры сопротивлений либо термисторы, причем наибольшее применение получили первые
Весьма важно, чтобы измеряемая величина возможно точнее соответствовала фактической температуре исследуемого материала. Поэтому измерение должно проводиться в точке, наиболее близкой к образцу, с использованием прибора, имеющего минимальную тепловую инерцию. Достичь этого в наибольшей мере удается именно с помощью термопары. Толщина проводов термопары должна выбираться небольшой, чтобы уменьшить тепловую инерцию и возможность отвода тепла по проволоке. С другой стороны, нельзя брать слишком тонкие провода, имея в виду малую их механическую прочность. Обычно применяются провода сечением 0,3—0,4 мм.
Из распространенных термопар наибольшей термической и химической стойкостью обладают платина—платинородиевые. Наибольшей чувствительностью отличаются термопары медь— копель. Во многих случаях заслуживают предпочтения термопары хромель—алюмель, обладающие при достаточной чувствительности и химической стойкости наиболее близкой к линейной зависимостью э.д.с. от температуры. Значения э.д.с. всех распространенных термопар точно определены и могут быть найдены в таблицах [106]. Проверка термопар может быть проведена по известным эталонам [107].
Если измерительный прибор имеет шкалу, отградуированную в милливольтах, целесообразно, используя таблицы, изготовить параллельную шкалу, указывающую непосредственно градусы. Подробные сведения о термопарах, их монтаже и применении в термическом анализе приводятся в руководствах по термографии [108, 109].
Определение температуры с помощью термопары сводится к измерению термо-э.д.с., т. е. разности потенциалов между спаем, находящимся в исследуемой точке (рабочим спаем), и ее концами, образующими так называемые холодные или свободные спаи. Последние представляют собой спаи проволок термопары с медными проводами, ведущими к измерительному прибору. (Если присоединять к прибору непосредственно рабочие проволоки термопар, роль холодных спаев выполняют клеммы прибора.)
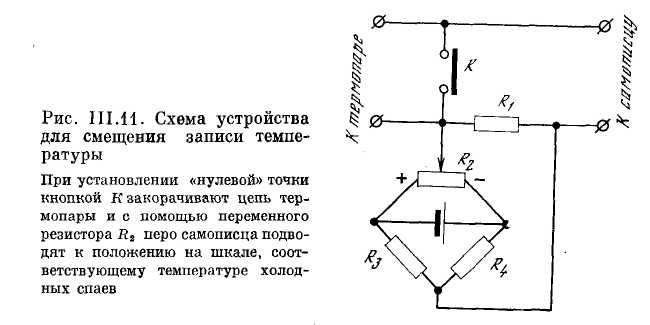
Поэтому в большинстве электронных потенциометров, предназначенных специально для измерения температур (на шкале их указаны градусы), к которым термопара присоединяется непосредственно, предусмотрена автоматическая компенсация, корректирующая показания прибора, когда температура его (в том месте, где находятся входные клеммы) изменяется в ходе работы. Естественно, такая компенсация и точность отсчета обеспечиваются только в отношении того вида термопар, на который рассчитан данный прибор. В приборах, имеющих градуировку в милливольтах, а не в градусах, такой компенсации нет и термопара к ним должна присоединяться с помощью медных проводов (рис. III.10).
Температура холодных спаев является репером, по отношению к которому проводится отсчет термо-э.д.с, и температура их должна поддерживаться постоянной. Часто эти спаи помещают в сосуд Дьюара с тающим льдом (отсюда, видимо, и произошло название «холодный спай»; впрочем, термин явно неудачен, ибо при низкотемпературных измерениях рабочий спай оказывается еще более холодным). Данный способ удобен, поскольку обеспечивается постоянство температуры, пока не растает весь лед. В большинстве таблиц э.д.с. термопар указаны именно по отношению к температуре холодного спая 0° С. Чтобы обходиться без льда, выпускаются специальные малогабаритные термоэлектрические термостаты, например типа «Нуль-В» Львовского завода биофизических приборов, известным недостатком которых является значительная длительность вхождения в режим. Некоторые исследователи помещают холодные спаи в термостат с иной фиксированной температурой.
Температура холодного спая может быть не обязательно строго задана, например 0 или 20° С, лишь бы она была точно известна и оставалась неизменной на протяжении всего опыта. Имея в виду не слишком большие колебания комнатной температуры, можно полагать, что внутри сосуда Дьюара, наполненного водой комнатной температуры (или даже пустого), вариации температуры за 2—3 часа не превысят погрешности обычных измерений (±1°). В такой сосуд вставляют на пробке узкие пробирки с холодными спаями и контрольный термометр, к показаниям которого следует относить отсчет. При использовании самописцев это выполняется автоматически, если перед началом опыта установить в качестве начальной точки значение, указываемое контрольным термометром.
В некоторых современных самописцах имеется специальный орган управления «смещение записи». Замкнув у входа накоротко провода от термопары, поворотом соответствующей рукоятки устанавливают указатель прибора на нужном делении. При использовании самописца, в котором смещение записи не предусмотрено, это может быть достигнуто с помощью несложного внешнего устройства (рис. III.11). Небольшой резистор R1 (например, на 10 ом) не изменяет чувствительности и масштаба измерений.
Запись результатов измерений (если не говорить о визуальных отсчетах) чаще всего проводится с помощью электронных самописцев. Обычные самописцы (типа X—) регистрируют значение измеряемой величины в зависимости от времени в виде непрерывной кривой. Это достигается смещением пера вдоль линейной направляющей на величину, пропорциональную измеряемому значению X, тогда как диаграммная бумага движется в перпендикулярном направлении с постоянной скоростью так, что смещение ее пропорционально времени .
При необходимости записывать одновременно изменение нескольких величин применяют многоточечные самописцы, в которых автоматический переключатель периодически включает последовательно каждую из измерительных цепей, а специальное печатающее устройство отмечает на диаграмме точки. Однако, поскольку между измерениями в каждой из цепей проходит некоторое время, такой способ записи не дает возможности следить за быстропротекающими процессами. В этом отношении непрерывная запись имеет большие преимущества.
Иногда применяют одновременно два или несколько отдельно действующих самописцев; при одинаковом масштабе по оси времени можно наносить в случае необходимости несколько графиков на одну диаграмму. Имеются и специальные двух- и многоперьевые приборы (типа Х1Х2....—)*, в которых возможна регистрация параллельно двух или большего числа кривых. Это тоже, по существу, два (или несколько) одновременно действующих самописца, однако перья их оставляют след на одной и той же диаграмме. Направляющие перьев располагаются параллельно и как можно ближе друг к другу. Дистанция между ними, необходимая, чтобы избежать столкновения перьев при пересечении графиков, обусловливает сдвиг вдоль оси времени одной записи по отношению к другой. Впрочем, зная величину сдвига, можно легко находить синхронные точки на кривых. Особенно удобны для этого отметчики, дающие мгновенный небольшой отброс каждого из перьев одновременно, как правило, через 5, 10 мин. и т. д. Считывая такие записи для одного и того же момента времени, можно получать данные для построения графика взаимной зависимости измеряемых величин.
Принципиально новую возможность открывает использование двухкоординатных самописцев (типа X—), в которых регистрируется непосредственно функциональная зависимость двух величин. На таких самописцах получают сразу готовую ТМА-кривую [104, 110]. Поскольку при двухкоординатной записи время не фиксируется, эксперимент должен проводиться в строго определенном временном режиме: нагрев следует вести с заданной постоянной скоростью.
* Иногда их называют двух-или многоканальными. Таков, например, прибор КСПП-4.
Двухкоординатные самописцы представляют собой комплекс из двух автономных электронных потенциометров, имеющих одно общее перо и связанных таким образом, что один их них обеспечивает перемещение пера вдоль оси X, а другой — вдоль оси Y. Возможно конструирование и «гибридных» самописцев, в которых по одной из координат действует электронный потенциометр, а по другой — прибор с дифференциально-трансформаторной схемой [111]. Такой прибор особенно удобен для регистрации ТМА-кривых.
Можно использовать для той же цели и обычный самописец типа X—, изменив способ протяжки в нем диаграммной бумаги. Если движение ее задавать не от обычного непрерывно действующего синхронного двигателя, а от механизма, следящего за деформацией (см. выше), то перо самописца вычертит также готовую ТМА-кривую [99].
Помимо электронных самописцев, возможна запись деформации и температуры также на фоторегистрирующих приборах, таких, например, как пирометр Курнакова и его модификации [1121, светолучевые осциллографы и т. д. Они имеют определенное преимущество при записи одновременно нескольких кривых, поскольку при пересечениях этих кривых не возникает препятствий, неизбежных в случае использования электромеханических устройств — многоканальных самописцев.
Неудобства же фоторегистрирующих приборов связаны с тем, что в большинстве случаев о ходе кривых можно судить лишь после завершения всего опыта и выполнения фотографических операций проявления и фиксирования изображения. К тому же этим способом обычно не могут быть получены готовые ТМА-кривые -Т.
Фоторегистрация осуществляется с помощью зеркальных гальванометров постоянного тока. Их устройство и приемы записи показаний при измерении температуры достаточно полно описаны в руководствах по термическому анализу [109]. Что касается способа записи деформации, то он зависит от типа преобразователя. Во всех случаях шкала записи должна быть откалибрована с помощью балластных и шунтирующих сопротивлений таким образом, чтобы при ожидаемых максимальных изменениях измеряемой величины запись полностью укладывалась в избранный размер графика.
Нагревательное устройство должно обеспечивать повышение температуры образца в ходе его исследования. Для этого служит печь или обогреваемый металлический блок, внутрь которых помещаются рабочие органы прибора. Поскольку во многих случаях измерения проводятся от низких температур, блок должен быть приспособлен не только для нагрева, но и для охлаждения. В лучших приборах рабочая область простирается от -100° (и даже ниже) до +500° С (более высокие температуры для исследования полимеров вряд ли нужны).
Охлаждение термического блока при низкотемпературных исследованиях чаще всего проводят жидким азотом, пропуская его перед опытом через устроенные в теле блока каналы и полости, либо путем погружения в сосуд Дьюара с жидким азотом специального отростка блока, играющего роль хладопровода. Плавный подъем температуры охлажденного блока проводится с помощью электронагревательной обмотки.
Хорошим материалом для изготовления термического блока является чистый алюминий. Его высокая теплопроводность способствует быстрому прогреву блока и созданию в нем равномерного температурного поля. Конструкция нагревательного устройства должна обеспечивать плавность нагрева, защиту от тепловых потерь, влияния воздушных потоков, а при низких температурах — и от конденсации и намерзания атмосферной влаги.
В ходе нагревания температура образца неизбежно отстает от температуры блока, однако при постоянстве скорости нагрева последнего в системе устанавливается квазистационарный режим. Он характеризуется, в частности, тем, что разность температур блока и образца (как и вообще разность температур в любых двух точках системы) оказывается всегда постоянной. Иначе говоря, линейному нагреву блока соответствует также линейное, с той же скоростью, повышение температуры в образце. Поэтому важным элементом аппаратуры для ТМА является устройство для регулирования нагрева блока (печи) *.
Регулятор нагрева. Есть два принципиально различных подхода к решению задачи обеспечения линейного нагрева. Первый заключается в том, что печь питают током при непрерывно возрастающем напряжении (например, от ЛАТРа, контакт которого медленно подвигают с помощью подходящего двигателя с редуктором). При этом предполагают, что линейному росту напряжения питания отвечает и линейный подъем температуры. Поскольку это предположение обычно не выполняется, предпринимались попытки подогнать программу изменения напряжения во времени таким образом, чтобы она обеспечивала по возможности линейный нагрев. Но это далеко не лучший путь. Изменение начальной температуры и интенсивности охлаждения, колебания напряжения сети, воздушные потоки и даже просто изменение температуры в рабочем помещении — все это влияет на истинную величину достигаемой температуры, несмотря на строгую, казалось бы, запрограммированность электрического питания.
* В некоторых случаях в качестве нагревательных устройств для целей ТМА применялись жидкостные и воздушные термостаты, в которых уровень задаваемой температуры непрерывно повышался.
Другой подход к решению задачи заключается в использовании основного принципа автоматики — обратной связи. Он позволяет осуществлять нагрев в соответствии с заданной пр